Correcting Autonomous Vehicle Behavior to Ensure Rule Compliance
Published in 2026 IEEE International Conference on Robotics and Automation (ICRA), 2026
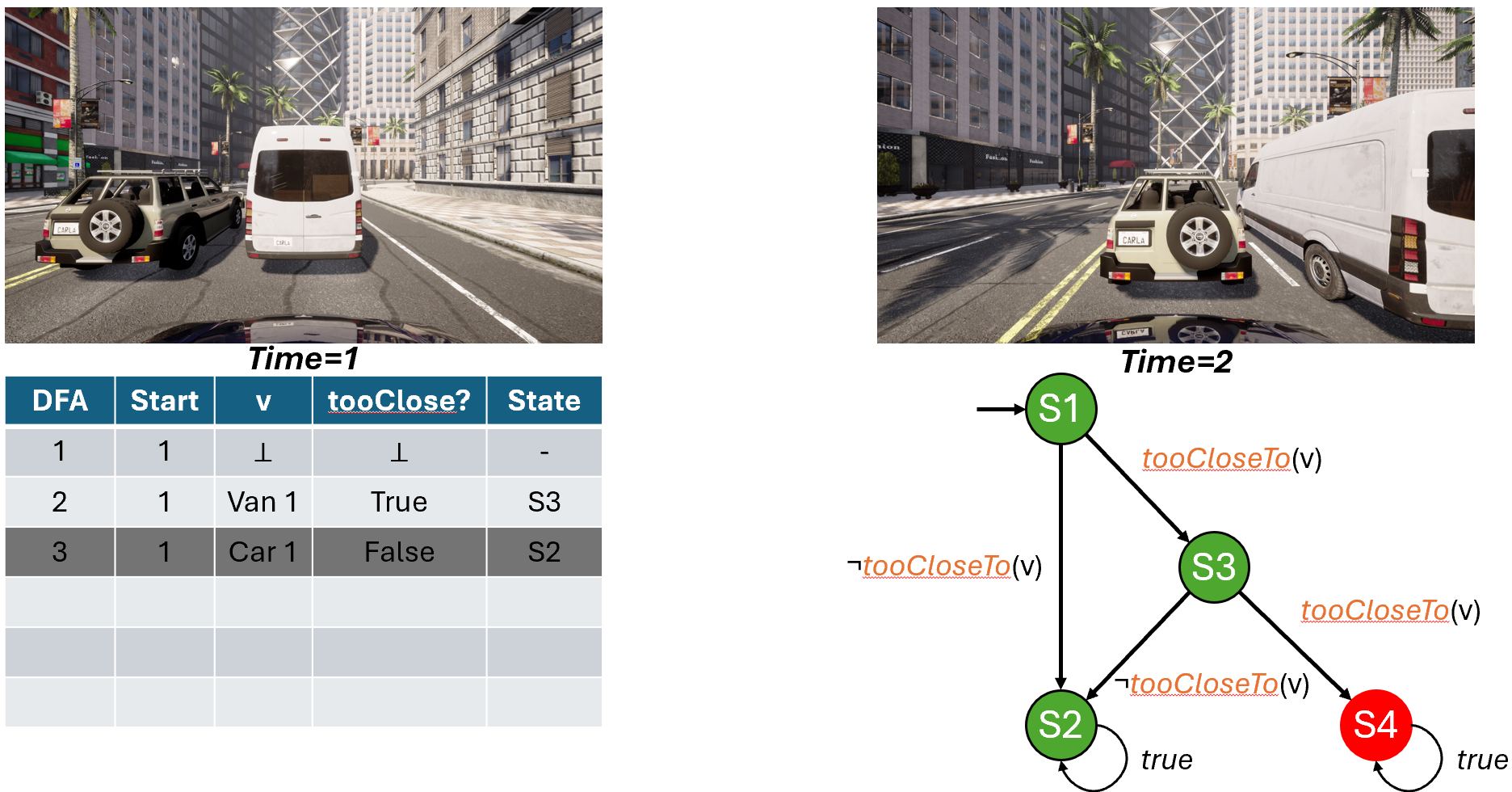
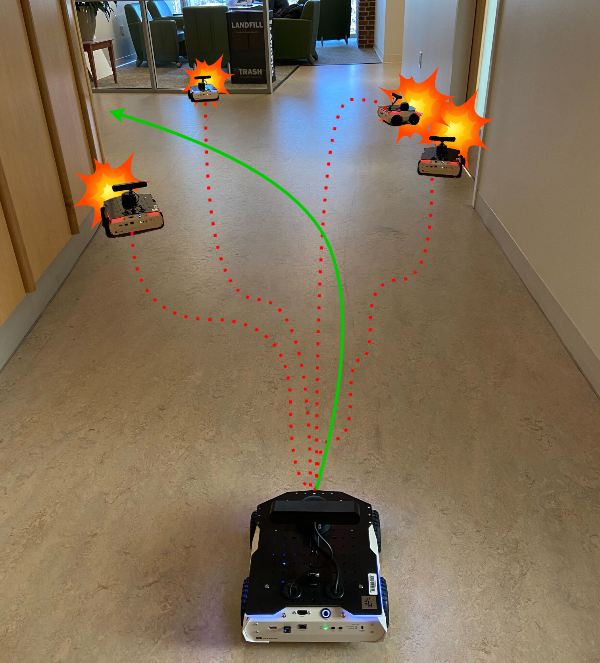
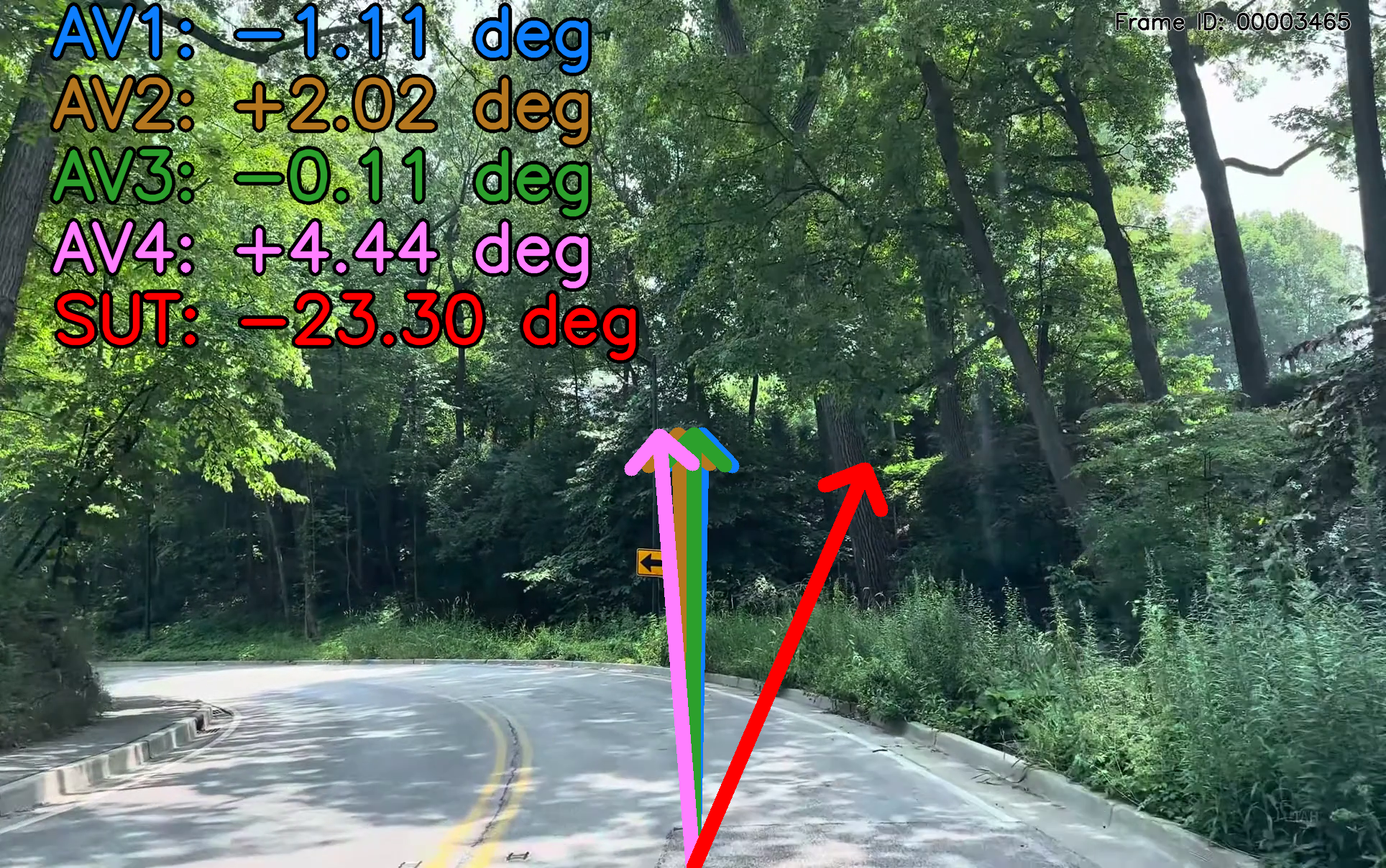
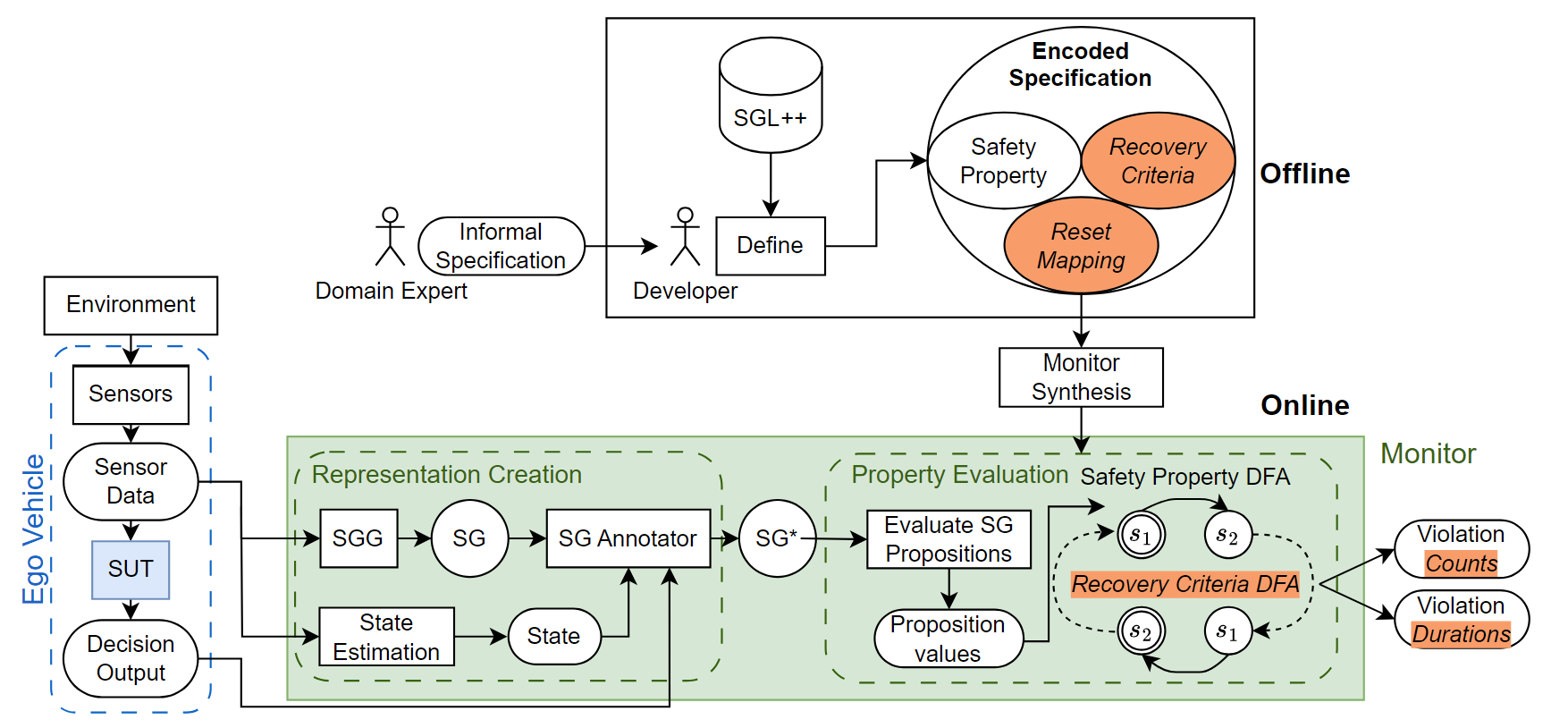
As autonomous vehicles (AVs) continue to gain prominence in public life, the cost of their failures becomes increasingly drastic, endangering human life. Such failures arise from AVs' inability to meet their safety specifications in the field. Recent works have aimed to improve AVs' compliance with their safety specification through improved training and runtime enforcement. However, these methods are limited, requiring access to system internals or relying on narrow assumptions, which reduces their generality. In this work, we propose a different paradigm, Monitoring for Property Compliance (M4PC), which independently evaluates the system's compliance with the specification. The approach operates in two steps. First, it leverages scene graph abstractions and a specialized graph generator to map sensor data to driving rule preconditions to determine if an intervention is needed. Second, to correct an erroneous system output, M4PC defines a safe region within the control space defined by all relevant postconditions and minimally alters the system’s output to ensure it remains within this safe region, thereby preventing property violations. We apply M4PC to improve the specification compliance of three state-of-the-art autonomous vehicles with varying architectures in the CARLA simulator. Our current implementation can improve a baseline system, while our most optimized implementation outperforms state-of-the-art techniques that require system access.
Recommended citation:
Coming Soon