
Specifying and Monitoring Safe Driving Properties with Scene Graphs
Published in 2024 IEEE International Conference on Robotics and Automation, 2024
Recommended citation: Copy BibTeX
Felipe Toledo, Trey Woodlief, Sebastian Elbaum, and Matthew B. Dwyer. "Specifying and Monitoring Safe Driving Properties with Scene Graphs." In 2024 IEEE International Conference on Robotics and Automation (ICRA), pp. 15577-15584. IEEE, 2024.
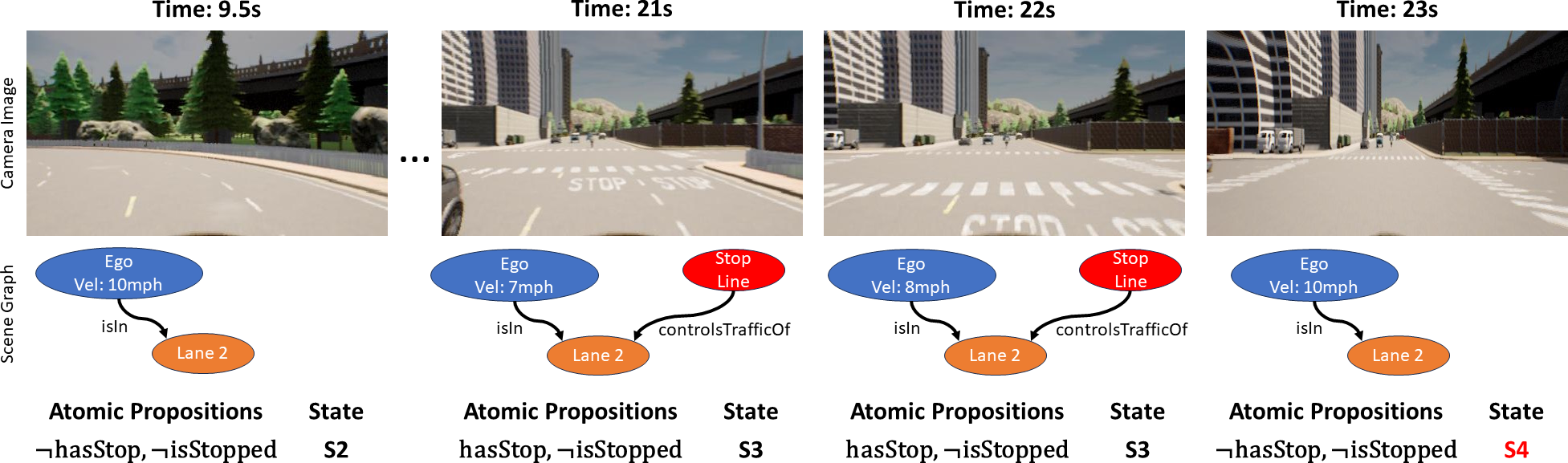
With the proliferation of autonomous vehicles (AVs) comes the need to ensure they abide to safe driving properties. Specifying and monitoring such properties, however, is challenging because of the mismatch between the semantic space over which typical driving properties are asserted (e.g., vehicles, pedestrians, intersections) and the sensed inputs of AVs. Existing efforts either assume for such sematic data to be available or develop bespoke methods for capturing it. Instead, this work introduces a framework that can extract scene graphs from sensor inputs to capture the entities related to the AV, and a domain-specific language that enables building propositions over those graphs and composing them through temporal logic. We implemented the framework to monitor for specification violations of 3 top AVs from the CARLA Autonomous Driving Leaderboard, and found that on average the AVs violated 71% of properties during at least one test.